|
VirtualHand SDK
产品/软件
概述
它简化了机械CAD、研发或3D电子商务领域的开发人员的模拟,使他们能够“手动启用”应用程序。SDK由三个主要组件组成:
设备管理器:一个多平台(W2K、NT、IRIX和WinXP)网络感知设备驱动系统,用于CyberGlove、CyberTouch、CycerGrasp和CyberForce系统,以及Polhemus Fastrak和Ascension Flock of Birds六自由度(DOF)跟踪器。
设备配置实用程序:一个用户友好的类似Windows的界面,用于校准和配置手套、触摸、抓握和六个自由度跟踪器。DCU允许您保存配置和配置默认设置。
VirtualHand API:一个功能齐全的C++开发库,包括对碰撞检测、手部交互管理和力反馈的支持。
规格
提供了一个带有附带C++库的面向对象模型。
提供了一个通用框架,用于从头开始构建手动模拟或将手动交互集成到现有应用程序中。
包括一个设备配置实用程序,允许用户以直观和图形化的方式校准和配置CyberGlove Systems的CyberGlover有线产品和受支持的跟踪器。
提供3D数字对象之间的实时碰撞检测功能。
为CyberGrasp和CyberForce系统用户提供部队反馈界面。
提供全面的网络支持。用户可以在主机上运行应用程序,同时从另一台机器获取设备数据,从而允许与地理分布的团队进行交互。
包括拾取加载到场景中的任意对象的抓取算法。
包括“鬼手”支持,用于管理位置跟踪器偏移,以防止图形手穿过对象。
提供快速多边形级别的碰撞检测引擎,包括用于支持专用第三方碰撞模块的开放API。
提供一个开放的API,用于模型导入和与第三方可视化软件接口。包括VRML/Cosmo(SGI Optimizer 1.2)实现。
提供了显著改进的总体结构,具有更好的运行时完整性和更完整的错误处理。
提供一套完整的开源演示应用程序,展示如何在开发中使用每个工具包功能。
照片/视频
SDK运动.JPG
SDK-motion2.JPG
SDK千斤顶.JPG
图像处理_添加最终.png
sdk单位.JPG
虚拟手机.png
20130207162234.jpg
handsdk-capture.JPG
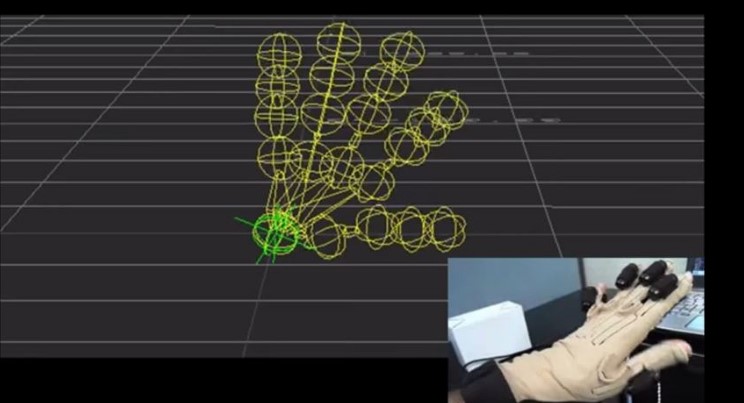
SDK-motion.JPGVHSDK样本空间中的手SDK-motion2.JPGSDK-jack.JPGImageHand_AddFinal.pngsdk-unity.JPGvirtualhanddk.png
应用程序/插件
VirtualHand SDK自定义应用程序
VH SDH示例应用程序
vhsdk样品在太空cgIII G4演示
VirtualHand SDK插孔插件
千斤顶驱动的分析手跟踪
杰克训练捕获
杰克训练捕获
VirtualHand SDK Matlab插件
MATLAB数据手套插件
VirtualHand SDK MotionBuilder插件
运动生成器1
Motionbuilder 2
VirtualHand SDK Unity插件
触觉鼓统一
数据表
下载PDF
相关产品
马上就来。。。
报错
笔记 |