|
在这项研究中,调节、平衡和校准是通过一个气动装置进行的,气动装置带有一个充满空气以施加均匀压力的聚氨酯内胆。该装置包括一个模拟压力表,以监测所施加的压力,一个拨号阀调节器,以应用压力,和一个拨动开关压力调节器。使用此设备的每个操作可以在几分钟内完成。
图3给出了典型传感器的校准曲线图,其中插入曲线图显示了不同压力水平下的响应与时间的关系。制造商建议的校准程序是(1)通过加载和卸载三到五次来调节传感器,达到预期峰值负载的120%(2) 在预期峰值负荷的中段平衡;以及(3)在一个(一个负载校准)或两个施加压力(两个负载校准)下校准。通常,将校准压力保持约1分钟,或直到使用可视化软件看到压力稳定为止。
图3。触觉压力传感器校准和响应与时间曲线的比较
图3的插图显示了传感器在五种不同压力水平下的详细校准数据。以raw/mm2为单位测量的传感器对时间的响应是非线性的,并根据选择的保持负载的时间产生不同的压力校准。通常,选择60到120秒之间的时间进行校准,因为在这段时间间隔内,测量负载几乎没有变化。在这项研究中,人们发现,传感器的响应是一个很好的特点,传统的蠕变模型负荷持续时间超过120秒。
图3中绘制了四条校准曲线,对应于四种不同的校准技术。根据制造商的建议确定的一个负载和两个负载标定的曲线是相对于五个负载标定绘制的,其中传感器在五个不同的压力水平下进行了更严格的标定。每次平衡和校准后,将压力降至零1小时以允许松弛,然后加压至更高,以进行下一级平衡和加压。通过将施加的载荷保持60和120 s来执行两次五次载荷标定。
图3显示,在95%置信水平下,二负荷和五负荷回归图在统计学上彼此不可区分。在所有施加压力下,尤其是在小于或等于25 kPa的压力下,单负载曲线图高估了一个负载压力,其中一个负载压力可能超过两个和五个负载校准压力25%。
剪切应力效应
触觉压力传感器仅用于测量法向应力。传感器制造商不提供说明或量化剪切效应的方法,用户手册通常建议减少或消除传递到传感器的剪切。剪切应力会使传感器的一片相对于另一片发生位移,损坏传感器,并导致法向应力读数不准确。
为了评估剪切应力对传感器测量的影响,对传感器进行了直剪试验。在测试之前,对传感器进行调节、平衡,然后使用双负载方法进行校准。图4示出了试验装置的示意图。直剪试验设计用于43至161 kPa的法向应力。如图所示,铁砝码悬挂在钢制吊架上,以向传感器传递法向力。将一个电动或手动千斤顶放置在与上部钢板接触的位置,并水平移动,直到引起移动。连续监测千斤顶位移、施加水平力和触觉压力传感器测得的力。
图4。评估剪切应力对触觉压力传感器测量影响的试验装置示意图
图4中的展开图显示了被测试的板材和薄板的水平面。在所有情况下,有两个12毫米厚的铝板定位在顶部和底部的层。此外,一块3毫米厚的毡被放置在底部铝板上,上面是触觉压力传感器板。水平测试层是指位于触觉压力传感器顶部的水平聚合物板。表1总结了调查的不同试验层以及与每个分层系统相关的试验数量。它还提供了一个简短的描述,测量法向力在应用剪切。对六种不同的分层体系进行了评价,包括单张低密度聚乙烯(LDPE)、LDPE片材与橡胶片材组合、两张LDPE片材、两张LDPE片材与Teflon喷雾润滑剂中间层、两张LDPE片材、一张LDPE片材与一张Teflon片材和两张Teflon片材。
表1。剪切试验结果汇总
图5给出了两层系统的代表性结果图8。触觉压力传感器垂直加载和卸载试验示意图
两个不同传感器(A和B)的测量和施加压力与时间的关系如图9所示。给出了使用两个和五个负载(120秒时)标定图测量的压力。与图3中的校准曲线一致,两次和五次负载校准的触觉压力传感器响应没有明显差异。测得的压力随时间呈非线性增加,120s时比施加压力低4%~9%。部分卸载后,测量的压力迅速下降,直到±120 s后施加压力的2%。
图9。垂直加载和卸载触觉压力传感器测力和作用力的比较
这些测量结果证实了本文前面演示的性能,并显示了测量压力和施加压力之间的良好比较,前提是在加载后的时间与传感器校准中使用的时间一致。此外,在部分卸载后,测量的压力与施加的压力进行了比较,表明传感器可以为简单的卸载应力路径提供可靠的测量。
大规模试验期间测量的荷载与施加的荷载
触觉压力传感器已用于埋地管道地面破裂效应的全尺寸三维(3D)试验,以及管道在全尺寸水平地面位移和离心机下的二维(2D)试验(Ha等人,2008;O'Rourke和Bonneau,2007年;O'Rourke等人,2008年)。联合试验是利用乔治E。Brown Jr.,地震工程模拟网络(NEES)(O'Rourke et al.2008;Palmer等人,2006),以改进大地面变形下土壤-管道相互作用的设计。
Paikowsky和Hajduk(1997)测量的触觉压力传感器响应作为颗粒介质中加载速率的函数,为传感器性能提供了有价值的见解。Paikowsky和Hajduk比较了加载速率在1到10千帕/秒之间时施加的压力和传感器输出。他们根据不同加载速率下施加应力和传感器输出随时间的线性回归,开发了校准程序,并表明校准程序产生的测量值在规定范围内±对于单调增加的荷载和超过100 kPa的施加压力,为施加压力的10%。
NEES场地大变形的土-管道相互作用试验为进一步探索可变加载速率下的传感器响应提供了机会。对装有触觉压力传感器的埋地管道进行了大规模二维试验,试验中施加了2.5mm/s的恒定水平运动速率。管道上的横向力是独立于传感器测量的。没有进行特殊的传感器校准,以说明负载率的影响。其目的是直接比较独立获取的载荷与使用前面描述的两个载荷标定的传感器测量的载荷。两个测量值之间的有利比较将使传感器的使用更容易、更迅速。此外,仍有机会进行更详细的校准,如Paikowsky和Hajduk(1997)所述,以进一步提高负载率影响的准确性。
此外,土壤-管道相互作用试验提供了管道上压力分布的测量值,作为土壤和管道之间相对运动的函数。测量结果显示了压力是如何随着相对位移的增加而在管道周围逐渐发展的。
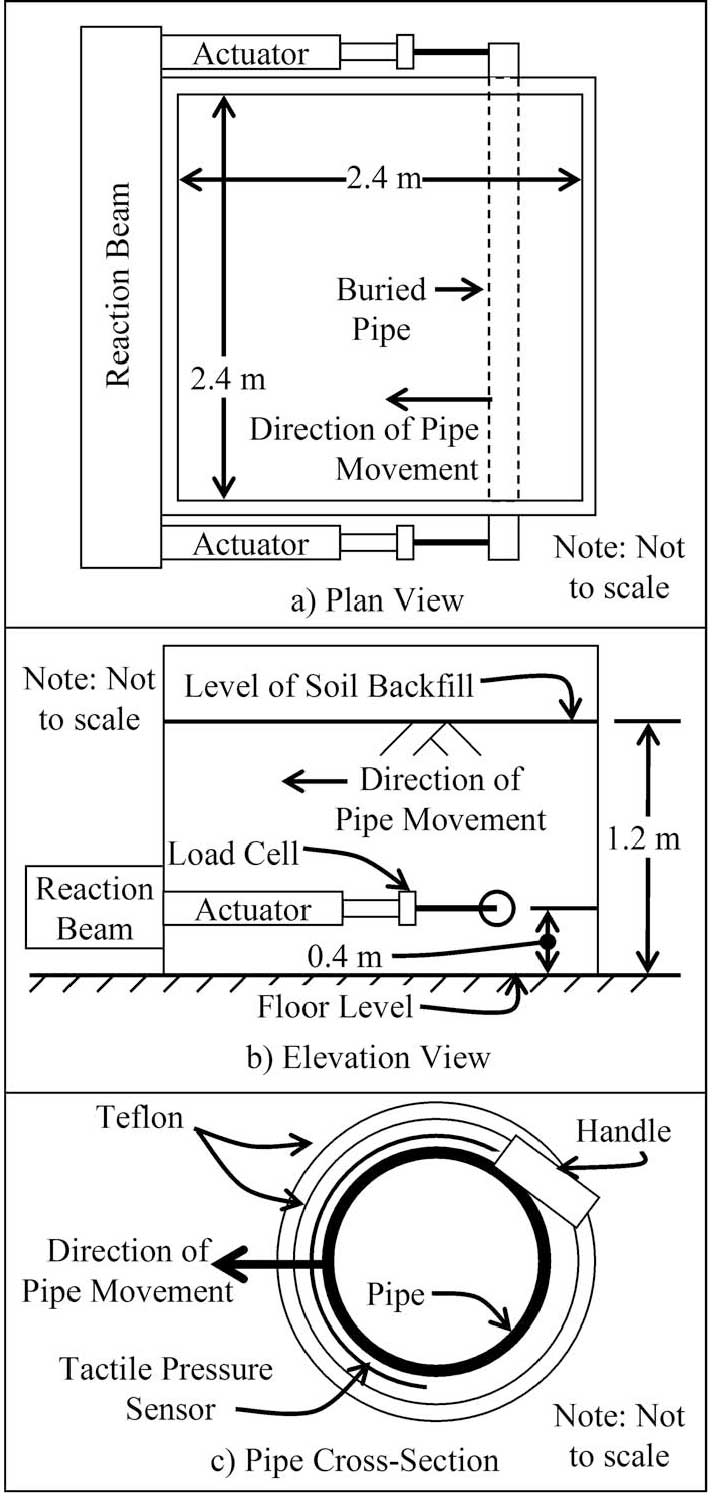
图10显示了大型2D试验水池的示意图,该试验水池填充了在干燥和部分饱和条件下放置的级配不良的冰川洪积砂,并以200mm的高度压实。平均粒径为0.7mm,比10×10mm的传感器小一个数量级以上。关于沙子的粒度特征、矿物学和强度特性的详细信息在别处进行了描述(O'Rourke et al.2008)。采用不同干密度、不同含水量、不同峰值抗剪角(由直剪试验确定)和不同管道中心线深度与管道外径比(Hc/D)的试验池和砂进行了多重土-结构相互作用试验。
图10。地下管线水平力与位移二维试验水池示意图
水池设计用于通过使用两个长冲程(一个方向1.2 m)液压执行机构施加水平力来测量管道的横向力与位移,如图所示。水平力通过称重传感器在箱体的每一侧测量,横向运动通过Temposonic测量提供电压的位移传感器 |