通过特殊试验仔细评估沿试验池侧壁产生的摩擦力,其中试验管横向移动的滑动机构承受测量的水平荷载,同时测量滑动的横向阻力。在这些测试中,触觉压力传感器被用来测量垂直于盒子内侧的力。通过将法向力乘以tan 8SB,将这些力转换为水平阻力,其中8SB是土壤与盒子内部的Formica和玻璃表面之间的界面摩擦角。用60×60mm直剪仪测试表明,8SB约为25° 用于测试砂与福米卡和玻璃之间的界面。从外部测力传感器测得的水平力中减去管壁摩擦力,以提供管道上的实际横向力。一般而言,峰值水平荷载下端部剪切效应的修正值小于实测横向荷载的6%。
结论
在存在土壤-结构相互作用剪力的情况下,使用触觉压力传感器将导致传感器损坏或法向应力读数不准确。一个保护系统,其中包括两层特氟隆被发现,以保护传感器和大大减少剪切应力对传感器测量的影响。
试验结果表明,当压力超过传感器压力上限的15%时,传感器测量值在加载60~120s后施加压力的10%以内。这项研究的结果证实了其他研究者的发现(如Paikowsky和Hajduk 1997),即当压力水平小于最大压力范围的15%时,测量不准确度增加。
与传统的土壤应力传感器相比,触觉压力传感器的测量精度更高。触觉压力传感器通过在相对较大的表面上提供分布式应力测量并适应传统应力传感器不可能实现的各种表面几何形状,具有额外的优点。
传感器测量的蠕变在加载后大约120 s开始。对于较长测量持续时间的传感器响应,其特征在于传统的蠕变方程,其中测量压力的增量等于蠕变系数和对数时间变化的乘积。随着时间的推移,应从测量压力中减去该表观压力,以估计实际施加的压力。
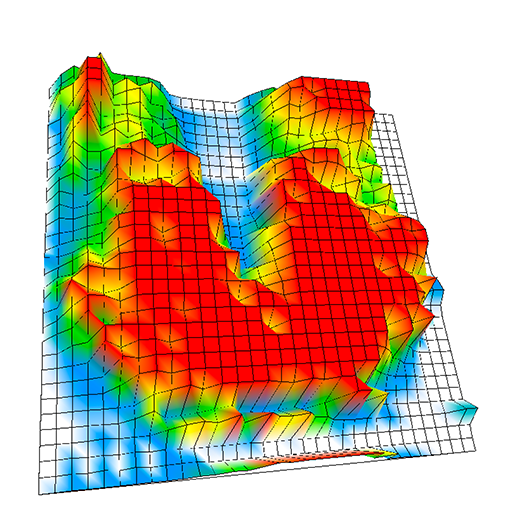
二维土-结构相互作用试验是用触觉压力传感器包裹在埋在沙土中并侧向位移的管道上进行的。由传感器数据生成的P-y曲线与由施加荷载的独立测量得出的曲线比较良好。本文提供了从传感器测量中解析管道上的法向应力以及确定管道上的水平力的方法。
基于本研究所获得的试验结果,触觉式压力传感器具有适当的精度和通用性,可用于大型实验室和土-结构相互作用离心试验中法向应力的可靠测量。但是,必须注意消除或减轻传递到传感器表面的剪切应力,并考虑时间-基于本研究所获得的试验结果,触觉式压力传感器具有适当的精度和通用性,可用于大型实验室和土-结构相互作用离心试验中法向应力的可靠测量。但是,必须注意消除或减轻传递到传感器表面的剪切应力,并考虑传感器对施加压力的时间依赖性响应。
致谢
这项工作主要是由乔治E。国家科学基金会Brown Jr.NEES项目,批准号CMS-0421142。本材料中表达的任何观点、发现和结论或建议均为作者的观点、发现和结论或建议,不一定反映国家科学基金会的观点。这个项目是一个合作项目的一部分,包括康奈尔大学的全尺寸埋管试验和伦斯勒的配套离心试验。作者感谢康奈尔大学土木基础设施实验室的Tim Bond先生和John Davis先生,以及康奈尔大学NEES设备现场的Joe Chipalowsky先生和Qinge Ma女士,感谢他们在测试设置和执行过程中提供的宝贵帮助。作者还承认康奈尔大学的博士学位。候选人耶利米·杰泽斯基感谢他在传感器测试中的协助。